Programação Arduino
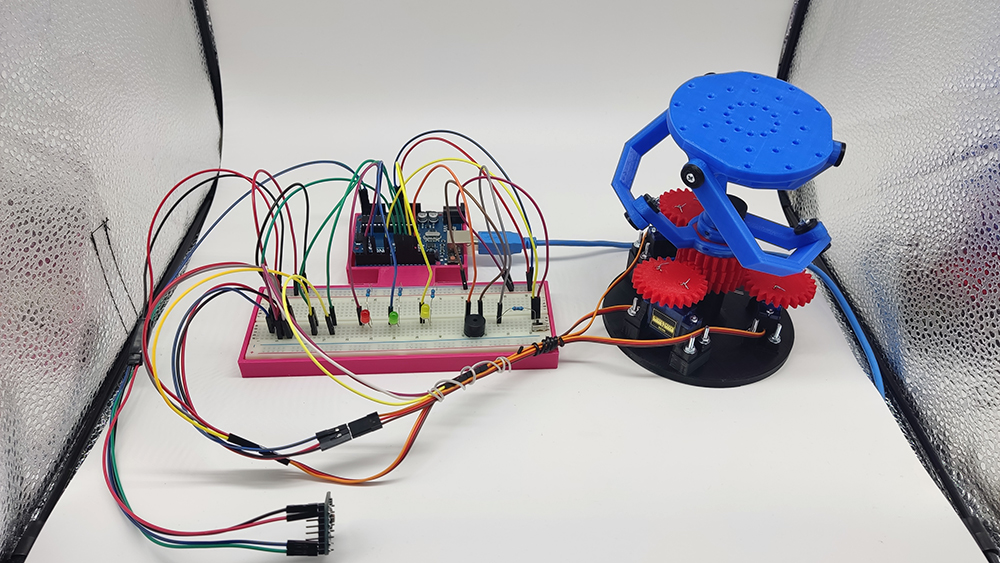
O objetivo deste projeto foi criar um dispositivo basculante baseado num atuador esférico paralelo. As engrenagens movem os braços que aplicam inclinação à superfície superior. Este dispositivo é movido por atuadores controlados por um Arduino Uno.
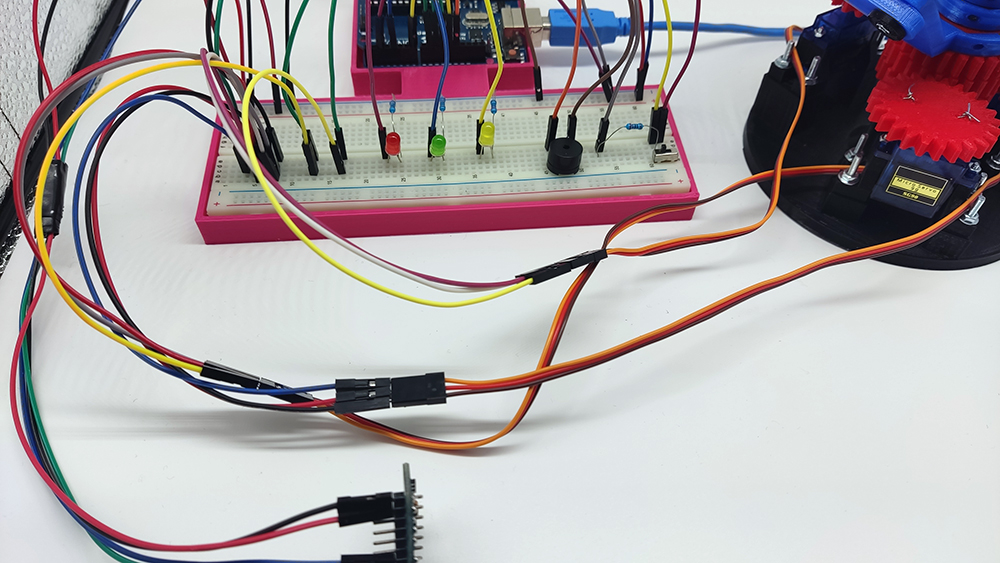
A movimentação deste dispositivo é realizada por meio de 3 servo motores, cada um com uma roda dentada aplicada. Os servo motores são controlados por um acelerômetro de 3 eixos (GY-291 ADXL345). O utilizador deverá movimentar este acelerómetro, aplicando-lhe inclinação de acordo com o eixo desejado. A inclinação de cada um dos eixos controlará cada um dos servomotores, que por sua vez movimentará uma roda dentada que finalmente aplicará inclinação à superfície superior do dispositivo.